Bei der Auslegung von Spindelhubgetrieben wird im allgemeinen wie folgt verfahren:
1. Festlegung der Geschwindigkeit, der benötigten Kraft und der möglichen Einbaulagen der Spindelhubgetriebe.
2. Auswahl der Antriebselemente (Kupplungen, Wellen, Kegelradgetriebe, Motoren) zum synchronen Antrieb der einzelnen Spindelhubgetriebe. Hierbei sind folgende Kriterien ausschlaggebend:
Hinweis: Kräfte und Momente lassen sich nur unter vereinfachenden Annahmen abschätzen; Reibungsbeiwerte von Gleitpaarungen und damit ihre Erwärmung und Lebensdauer sind Funktion von Last, Geschwindigkeit, Temperatur und Schmierbedingungen; kritische Drehzahlen und Knicklängen sind abhängig von der Steifigkeit und Masse der Einspannung und der Maschinengestelle etc.
Feff = Axialkraft auf die Hubspindel
FS = Resultierende aller Seitenkräfte auf die Hubspindel
M = Moment der Hubspindel oder Mutter (entfällt bei Ausführung
V)
VH = Hubgeschwindigkeit
Fax = Axialkraft auf die Antriebswelle
Fr = Radialkraft auf die Antriebswelle
MT = Antriebsmoment
nT = Antriebsdrehzahl
P = Steigung der Spindel
i = Übersetzung
η = Wirkungsgrad
M0 = Leerlaufdrehmoment (S. 28 (Nm))
Md Erforderliches Antriebsmoment [Nm]
n Spindeldrehzahl [1/min]
Pa Erforderliche Antriebsleistung [kW]
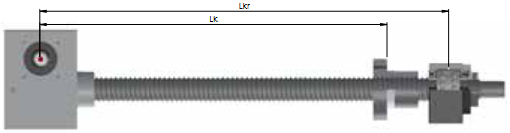
Bei schlanken Hubspindeln besteht die Gefahr des seitlichen Ausknicken unter Druckbelastung.
Vor der Festlegung der zulässigen Druckkraft auf die Spindel sind die der Anlage entsprechenden Sicherheitsfaktoren zu beachten.
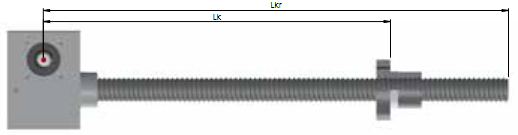
Lagerungsarten
Typische Werte des Korrekturfaktors fk entsprechend den klassischen Einbaufällen für Standardspindellagerungen.
Neff-Lagerfall I
Festlager-Loses Ende, Korrekturfaktor fk=0,25 / fkr=0,43
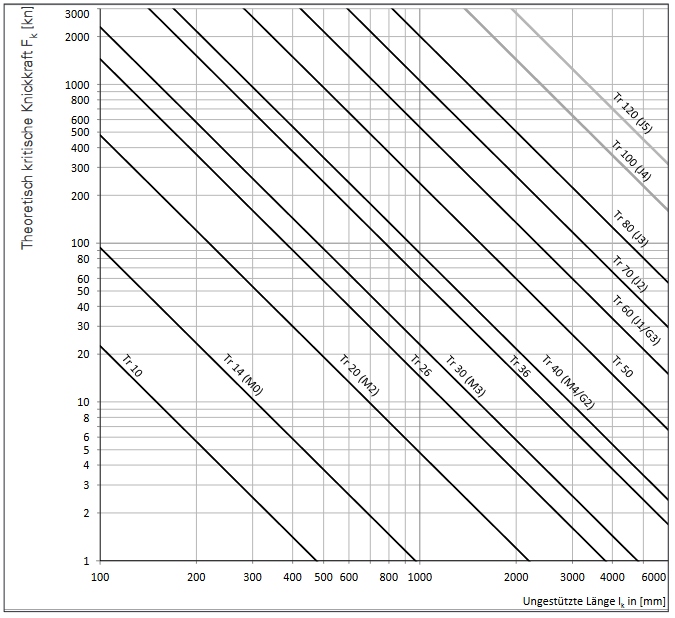
![Theoretisch kritische Knickkraft in [kN]](/fileadmin/user_upload/Grafik_zu_Theoretisch_kritische_Knickkraft_in__kN_.PNG)
Maximal zulässige Axialkraft in:
Fzul = Fk • fk • 1/Sf
Fzul Maximal zulässige Axialkraft [kN]
Fk Theoretische kritische Knickkraft [kN]
fk Korrekturfaktor, der die Art der Spindellagerung berücksichtigt
d2 Kerndurchmesser der Spindel [mm]
Lk Ungestützte Länge an der die Kraft auf die Spindel wirkt [mm]
Sf Sicherheitsfaktor (vom Anwender festgelegt)
Achtung!
Die Betriebskraft darf höchstens 80 % der maximalen zulässigen Axialkraft betragen
Loslager-Loslager, Korrekturfaktor fk=1 / fkr=1,21
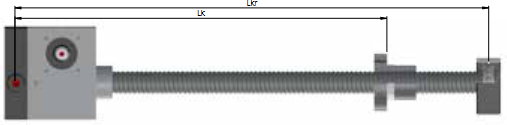
Festlager-Loslager, Korrekturfaktor fk=2,05 / fkr=1,89
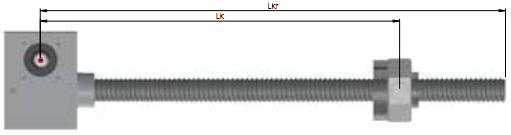
Festlager-Festlager, Korrekturfaktor fk=4 / fkr=2,7
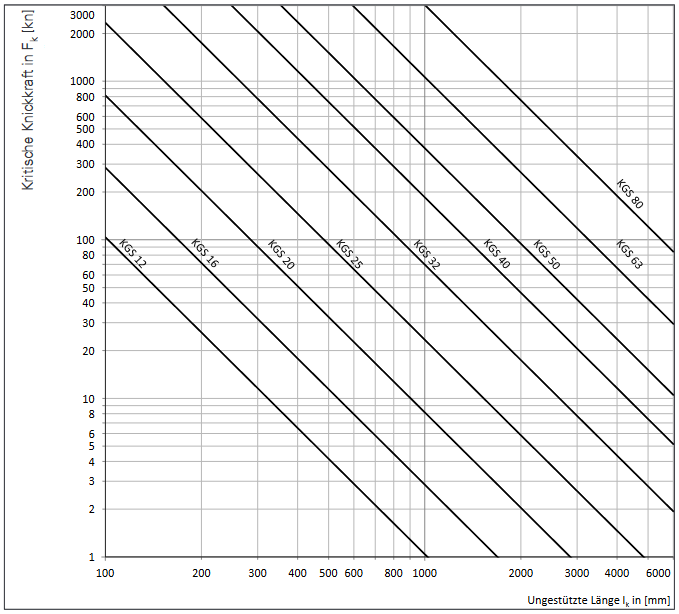
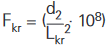
Theoretisch kritische Knickkraft in [kN]:
![Theoretisch kritische Knickkraft in [kN]:](/fileadmin/user_upload/Grafik_zu_Formel_Theoretisch_kritische_Knickkraft_in__kN_.PNG)
Maximal zulässige Axialkraft in:
Fzul = Fk • fk • 1/Sf
Fzul Maximal zulässige Axialkraft [kN]
Fk Theoretische kritische Knickkraft [kN]
fk Korrekturfaktor, der die Art der Spindellagerung berücksichtigt
d2 Kerndurchmesser der Spindel [mm]
Lk Ungestützte Länge an der die Kraft auf die Spindel wirkt [mm]
Sf Sicherheitsfaktor (vom Anwender festgelegt)
Achtung!
Die Betriebskraft darf höchstens 80 % der maximalen zulässigen Axialkraft betragen
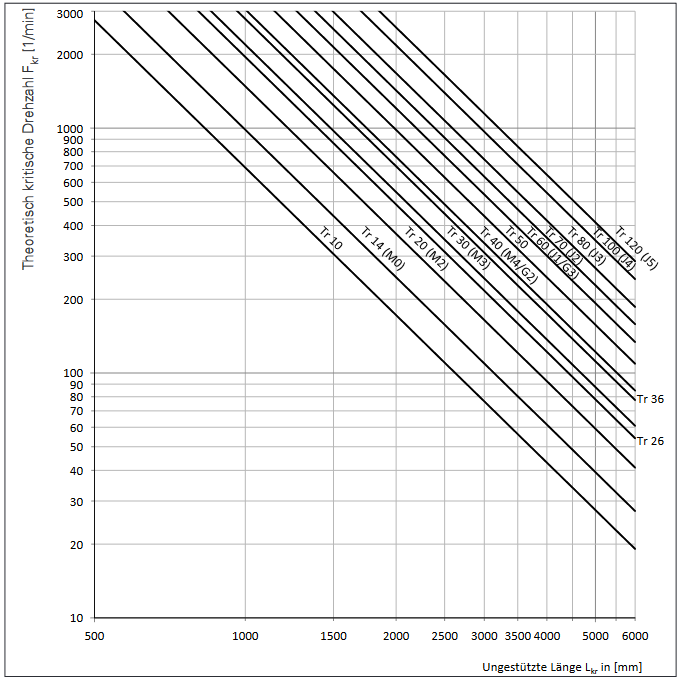
Theoretisch kritische Drehzahl in [1/min]
nzul Maximal zulässige Spindeldrehzahl [1/min]
nkr Theoretische kritische Spindeldrehzahl [1/min], die zu Resonanzschwingungen führt
fkr Korrekturfaktor, der die Art der Spindellagerung berücksichtigt
d2 Kerndurchmesser der Spindel [mm]
Lkr ungestützte Spindellänge [mm]
Achtung! Die Betriebsdrehzahl darf höchstens 80 % der maximalen Drehzahl
betragen!
Maximal zulässige Drehzahl in [1/min]
fkr = Fkr • fk • 0,8
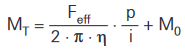
Das erforderliche Antriebsdrehmoment eines Spindelhubgetriebes ergibt sich aus der Axiallast auf die Hubspindel, der Übersetzung und dem Wirkungsgrad. Zu beachten ist, dass das Losbrechmoment erheblich höher sein kann als das im kontinuierlichen Betrieb erforderliche Drehmoment. Dies gilt insbesondere für Spindelhubgetriebe mit niedrigem Wirkungsgrad nach längerem Stillstand. Bei großen Spindelsteigungen und sehr kurzen Anlaufzeiten ist eventuell das Beschleunigungsmoment zu überprüfen.
MT ist das erforderliche Antriebsmoment des Spindelhubgetriebes an der Schneckenwelle [Nm].
Feff ist die tatsächlich wirkende Axialkraft auf die Hubspindel [kN].
η ist der Wirkungsgrad des Spindelhubgetriebes in Dezimalschreibweise, z. B. 0,32 anstelle von 32 %. η ist ein aus Messungen ermittelter Durchschnittswert.
p/i ist die Übersetzung des Spindelhubgetriebes in mm Hub pro Umdrehung der Schneckenwelle.
Mo ist das Leerlaufmoment des Spindelhubgetriebes [Nm]. Mo wurde durch Messungen nach kurzer Einlaufzeit mit Fließfettschmierung bei Raumtemperatur ermittelt. Es handelt sich hierbei um einen Mittelwert, der je nach Einlaufzustand, Schmiermittel und Temperatur mehr oder weniger großen Schwankungen unterworfen ist.
Hinweis: Das erforderliche Antriebsmoment stellt kein Kriterium zur Auswahl des Motors dar. Der Anwender muß hier entscheiden, welche Leistung er für erforderlich hält!
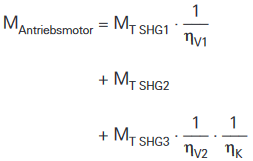
Das erforderliche Antriebsdrehmoment einer Spindelhubanlage ergibt sich aus den Antriebsdrehmomenten der einzelnen Spindelhubgetriebe unter Berücksichtigung der statischen und dynamischen Reibungsverluste in den Übertragungselementen (Kupplungen, Verbindungswellen, Stehlager, Winkelgetriebe, etc.). Hierbei ist es nützlich, den Kraftfluss anhand einer Skizze zu veranschaulichen.
MT SHG1 ist das erforderliche Antriebsdrehmoment des Spindelhubgetriebes SHG 1. Zu beachten ist, dass das Anlaufdrehmoment (Losbrechmoment und eventuell Beschleunigungsmoment) erheblich höher sein kann als das für den kontinuierlichen Betrieb erforderliche Antriebsdrehmoment. Dies gilt insbe sondere für Spindelhubgetriebe mit niedrigem Wirkungsgrad nach längerem Stillstand.
ηv1 (V1) beinhaltet die statischen und dynamischen Reibungsverluste in den Stehlagern und Kupplungen.
ηv2 ist der Wirkungsgrad der Verbindungswelle V2.
ηv = 0,75...0,95 je nach Länge der Welle und Anzahl der Stehlager.
ηK ist der Wirkungsgrad des Kegelradgetriebes (nur bei Kraftfluss über die Verzahnung, hier also zwischen Verbindungswelle V2 und Antriebsmotor). ηK = 0,90
| M0 | M1 | M2 | M3 | M4 | M5 | J1 | J2 | J3 | J4 | J5 | |
| Übers. H (Trapez) | 0,18 | 0,3 | 0,55 | 1,18 | 2,3 | 4,7 | 6,5 | 8,4 | 10,9 | 14,7 | 19 |
| Übers. L (Trapez) | 0,12 | 0,19 | 0,35 | 0,75 | 1,4 | 3 | 4,2 | 5,4 | 7,3 | 9,3 | 12 |
| Kugelgewinde | 0,18 | 0,3 | 0,56 | 0,95 | 1,7/3,2 | 5,9 | – | – | 13,9 | – | – |
Sollte das Spindelhubgetriebe durch Anlaufen der Spindel gegen ein Hindernis blockieren, können von der Verzahnung noch die folgenden maximalen Drehmomente MT an der Antriebswelle aufgenommen werden. Bei hintereinander geschalteten Spindelhubgetrieben kann das dem Antrieb nächstliegende Spindelhubgetriebe dieses Moment auf seiner Antriebswelle übertragen.
| Baugröße | M T max [Nm] |
| M 0 | 1,5 |
| M 1 | 3,4 |
| M 2 | 7,1 |
| M 3 | 18 |
| M 4 | 38 |
| M 5 | 93 |
| J 1 | 148 |
| J 2 | 178 |
| J 3 | 240 |
| J 4 | 340 |
| J 5 | 570 |
Beschleunigungswerte
Drehstromasynchronmotor 4-polig:
Kräfte und Momente auf die Antriebswelle
Werden Spindelhubgetriebe nicht querkraftfrei über eine Kupplung auf der Motorwelle angetrieben, sondern mittels Kette oder Riemen, so ist darauf zu achten, dass die Radialkraft auf die Antriebswelle nicht die Grenzwerte (siehe Tabelle unten) überschreitet.
Im ungünstigsten Fall hebt die Schneckenwelle infolge Durchbiegung unter der Radialkraft FR vom Schneckenrad ab. Diese Anordnung ist zu vermeiden, da sich hier der Eingriff zwischen Schnecke und Schneckenrad verschlechtert und damit der Verschleiß zunimmt.
Die Kenntnis des erforderlichen Antriebsdrehmomentes und der Antriebsdrehzahl ermöglichen die Auswahl eines geeigneten Antriebsmotors. Es ist grundsätzlich zu überprüfen, ob keines der verwendeten Spindelhubgetriebe bzw. Übertragungsglieder vom Antriebsmotor überlastet werden kann. Diese Gefahr besteht insbesondere bei Anlagen mit mehreren Spindelhubgetrieben im Falle ungleichmäßiger Belastung. In der Regel muss die Anlage durch Endschalter bzw. drehmomentbegrenzende Kupplungen gegen Anfahren auf die Endposition oder auf Hindernisse geschützt werden.
Zahnriemen- oder Kettenantriebe können bei sehr kleinem Ritzel erhebliche Radialkräfte auf die Motorwelle ausüben. Im Zweifelsfall wird empfohlen, mit dem Motorenhersteller Rücksprache zu halten.
Die Auswahl eines Kegelradgetriebes wird von folgenden Größen
bestimmt:
Die erforderliche Antriebsdrehzahl ergibt sich aus der gewünschten Hubgeschwindigkeit, der Übersetzung des Spindelhubgetriebes und der Übersetzung der Übertragungselemente. Im Allgemeinen ergeben sich hierbei mehrere Möglichkeiten, um eine bestimmte Hubgeschwindigkeit zu erlangen. Kriterien für eine geeignete Auswahl sind:
Das Mutterndrehmoment M der Hubspindel ist das Drehmoment, das die Hubspindel auf die Befestigungsplatte ausübt (alle Ausführungen N außer V), bzw. das Drehmoment, das die Laufmutter von der Spindel erfährt (Ausführung R). Es ist nicht zu ver wechseln mit dem Antriebsmoment MT des Spindelhubgetriebes an der Schneckenwelle.
M [Nm] = Feff [kN] · fM (gültig für den mittleren und oberen Lastenbereich)
M ist das Mutterndrehmoment der Hubspindel [Nm] für den Bewegungsvorgang „Heben unter Last“.
Feff ist die tatsächlich aufliegende Axialkraft [kN].
fM ist ein Umrechnungsfaktor, der die Spindelgeometrie und die Reibung beinhaltet. Der Wert gilt für normale Schmierverhältnisse.
Der größere Wert ist bei Trocken- und Haftreibung anzusetzen. Bei der Ausführung Kugelgewindetrieb ist fM praktisch konstant.
| Baugröße | f M (Trapezgewinde) | f M (Kugelgewinde) |
| M 0 | 1,4 | 1,2 |
| M 1 | 1,6 | 1,6 |
| M 2 | 1,8 | 1,6 |
| M 3 | 2,7 | 1,6 |
| M 4 | 3,4 | 1,6/3,2 |
| M 5 | 4,6 | 3,2 |
| J 1 | 5,5 | – |
| J 2 | 6,4 | – |
| J 3 | 7,2 | 3,2 |
| J 4 | 8,0 | – |
| J 5 | 10,6 | – |
NEFF Gewindetriebe GmbH
Karl-Benz-Straße 28
D-71093 Weil im Schönbuch
Tel. 07157 53890-0
info[at]neff-gt.de
Seit über 100 Jahren entwickelt, fertigt und vertreibt das Familienunternehmen NEFF Gleitgewindetriebe mit verschiedenen Trapezgewindespindeln und Muttern, präzisionsgerollte oder geschliffene Kugelgewindetriebe und Spindelhubgetriebe mit höchster Präzision.